Custom Test Tools
Proprietary test systems built by Novus Labs to solve measurement problems off-the-shelf instruments can't — from frame-by-frame A/V analysis to physical touch simulation to multi-axis inertial sensor stimulation.
Request a DemoTools We Built Because No One Else Had Them
Each of these systems was developed in response to a real customer problem and has since become a core capability of our lab.

AV Analysis Suite
The Novus Labs A/V Suite is an efficient and accurate solution, taking a frame-by-frame and end-to-end approach to test and measurement that is agnostic to the underlying technology used for content delivery.
Combining cutting-edge analytics, powerful processing capabilities, and flexible test configurations, the Novus Labs AV Suite Core System provides the right mix of performance and versatility.
Explore the A/V Analysis Suite
2-Axis Rate Table
The bench top “2-Axis Rate Table” was developed in response to a customer's need to more effectively test inertial sensors for consumer electronics applications. The system allows for physical stimulation in 2 axes simultaneously to enable complex motion scenarios.
Explore Sensor Testing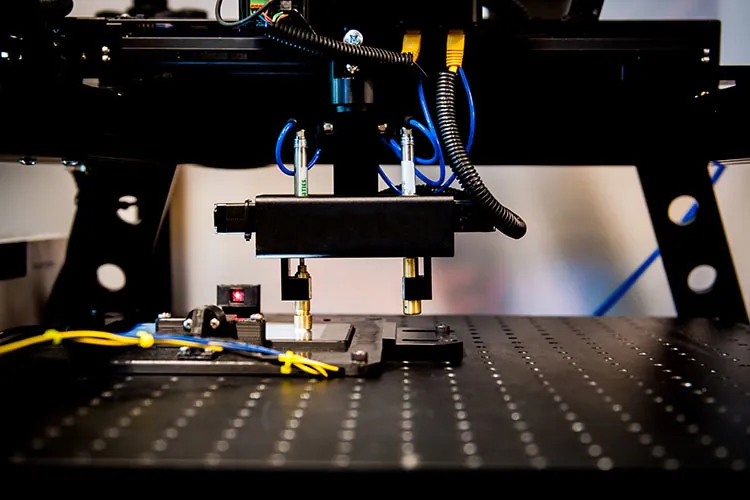
Mechanical Touch Simulator
The “Hard Touch” is a robotic platform developed to effectively test touchscreen applications. This solution automates the manual test process and compares actual physical stimulus to the input detected by the device under test.

Wi-Fi Mesh Roaming Testbed
Our four-chambered Wi-Fi mesh roaming testbed, complete with digital attenuator, custom-built noise generators, and bespoke control software allows us to run challenging roaming scenarios without leaving the lab.
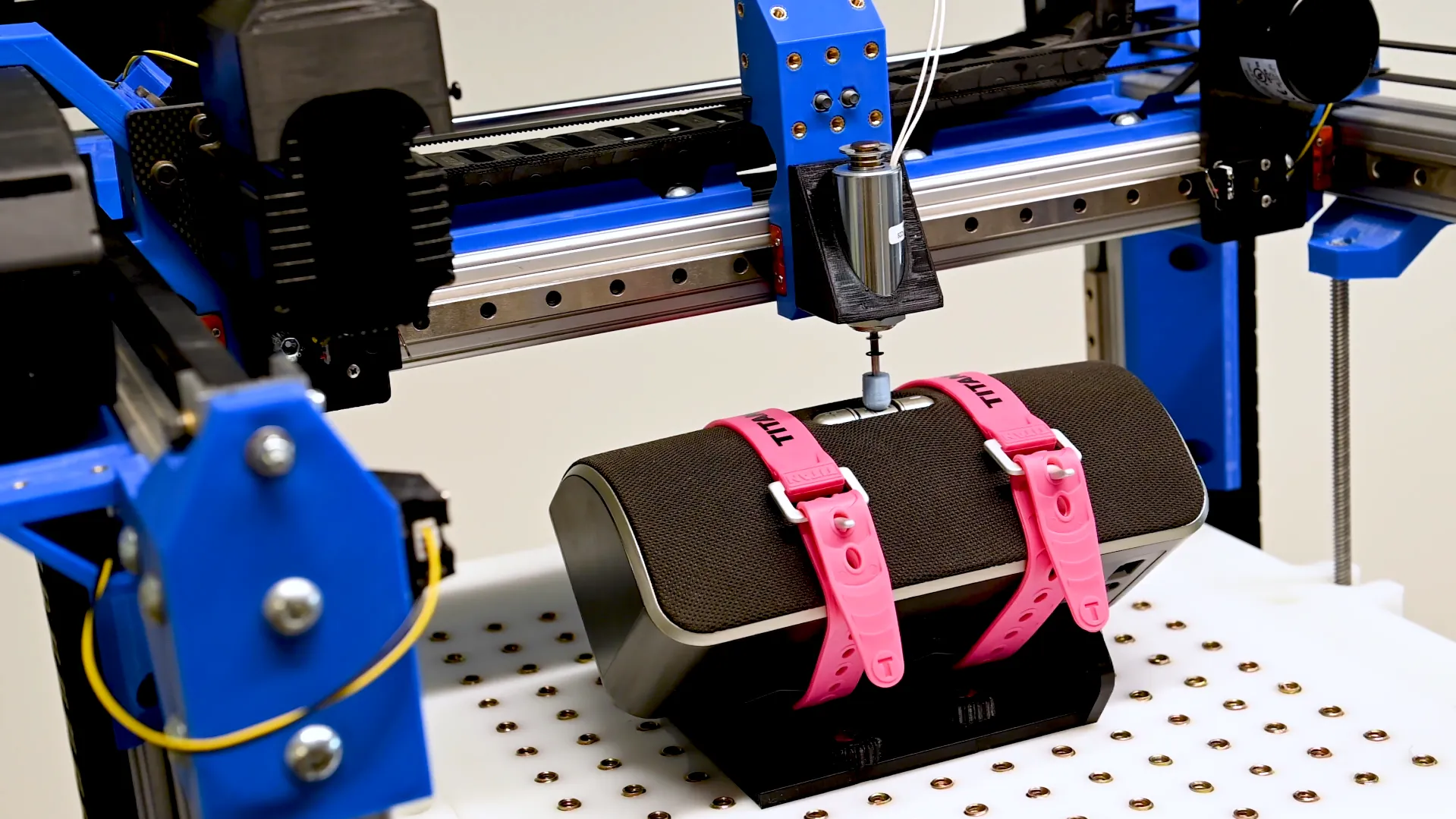
Button-pusher Harnesses
Button-pusher harnesses are custom mechanical assemblies we build to automate physical button presses for functional validation and long-duration stress testing. Whether the device under test is a customer prototype or a third-party interop reference — TV remotes, set-top boxes, VR headsets, gaming controllers, Bluetooth speakers — each harness is tailored to the button layout, force profile, and test cadence the program requires.
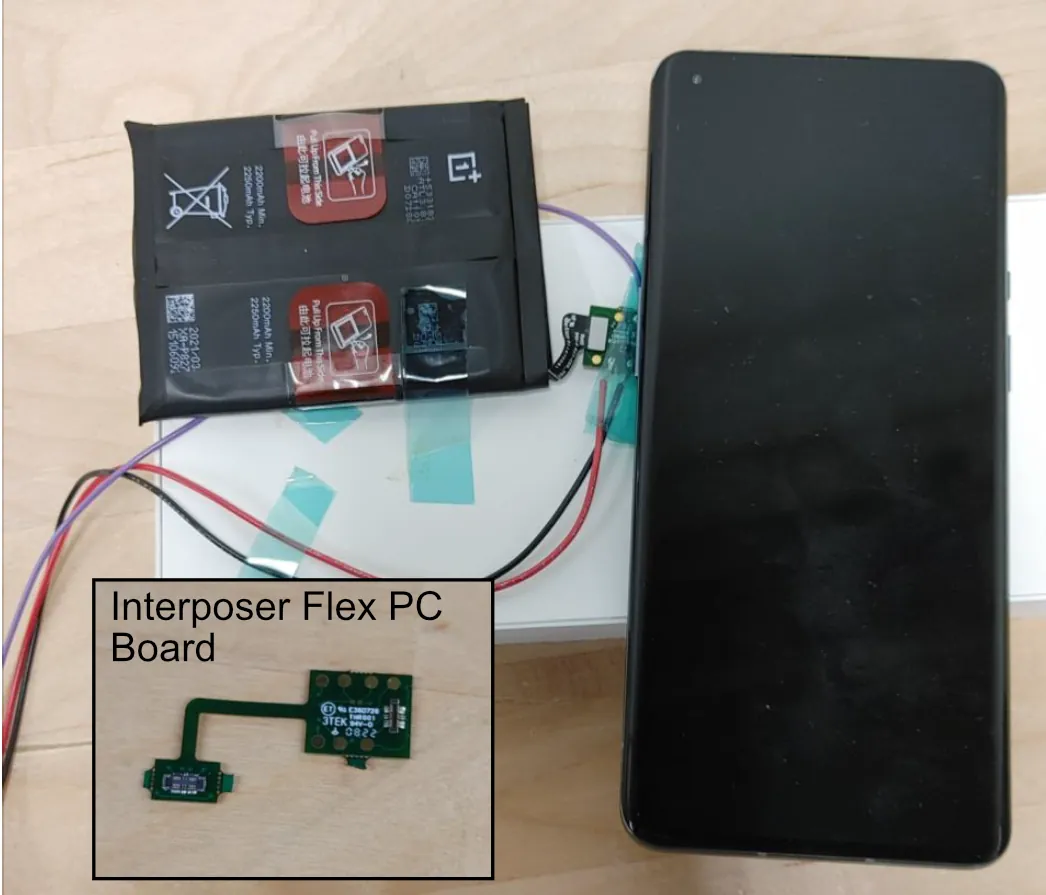
Interposer Boards
Interposer boards are custom PCBs we design to create electrical interfaces that don't exist off the shelf. Whether tapping into a proprietary bus, breaking out a high-density connector, or routing signals to instrumentation, our interposers unlock test and measurement scenarios that would otherwise be impossible.
Have a Measurement Nobody Else Can Make?
Talk to a Novus engineer about your custom fixturing, automation, or proprietary-tool needs — we build what the off-the-shelf world doesn't.